-
Ce tableau correspond à la solution technique pour la détections des bords si cela est pratique ou pas, comme l'efficacité des capteurs ou bien détecteur en ligne.
-
Ce tableau correspond à la mobilité de certains robot qui ne peuvent pas toujours être stable . Il indique ainsi la vitesse le prix ..
-
Ce tableau correspond aux critères des moteurs si cela et satisfaisant ou pas .
-
-
ll existe trois types de moteurs :
- le moteur à courant continu
- le moteur pas à pas
- le servomoteurs à rotation continue
Le moteur électrique est composé d'un rotor et d'un stator qui lui permet de transformer l'énergie électrique en énergie mécanique de rotation adaptée.
Nous avons observer que si la tension de voltage est élevée notre robot ira plus vite et que plus le diamètre des roues est grand plus il ira vite si il ne pousse pas un obstacle. Mais si il doit pousser un obstacle cela le ralentira. Nous avons également constatés que plus le rapport de transmission est élevé plus la vitesse sera grande.
Les performances du moteur électrique seront liés au rapport de transmission choisi mais aussi au diamètre des roues.
- Moteur à courant continu Moteur pas à pas Servomoteur à rotation continu



Radia , Elie , Chloé
-
-
3 roues :
Les avantage : solution pas chère , faire demi-tour sur lui même
Les inconvénients : mobilités sur une surface parfaitement plane , la vitesse du robot est limitée
6 roues :
Les avantages : Il est stable et il est capable de circuler dans différents lieux comme des zones irrégulier
Les inconvénients : solution la plus coûteuse parmis les roues
Chenilles :
Les avantages : Il peut avancer dans différent lieux et passer sur des obstacles les plus imposant , réussir à monter de forte pente
Les inconvénients : Il est coûteux mais moins mobile et les composants sont coûteux aussi
Deux Jambes :
Les avantages : Les jambes peuvent être plus efficaces que les roues , il est capable de monter les escaliers
Les inconvénients : Elle ne tienne pas très bien l'équilibre , très coûteuse et complexe à mettre en oeuvre
6 Pattes :
Les avantages : Ils ont un meilleur équilibre et sont moins coûteuse
Les inconvénients : Ils sont moins mobiles que les bipèdes .
- Nous avons choisi le robot à 3 roues :)
-
-
-
-
-
-
-
- Le projet va se dérouler au total sur 43,5 h de cours c’est à dire sur 29 cours de technologie :
1ère étape : L’appropriation du cahier des charges qui se finira le 7 novembre 2017 suite à 5 cours de technologie .
2ème étape : La recherche de solutions techniques qui se finira le 19 décembre 2017 suite à 6 cours de technologie .
3ème étape : Le choix de solution et revue du projet qui se finira le 6 février 2018 suite à 5 cours de technologie.
4ème étape : La réalisation et la validation du robot qui se finira le 24 avril 2018 suite à 7 cours de technologie.
5ème étape : La présentation finale du projet qui se finira le 22 mai 2018 suite à 2 cours de technologie .
6ème étape : Tournois du robot en juin 2018 , environ 6 heures .
Par Elie :)
-
-
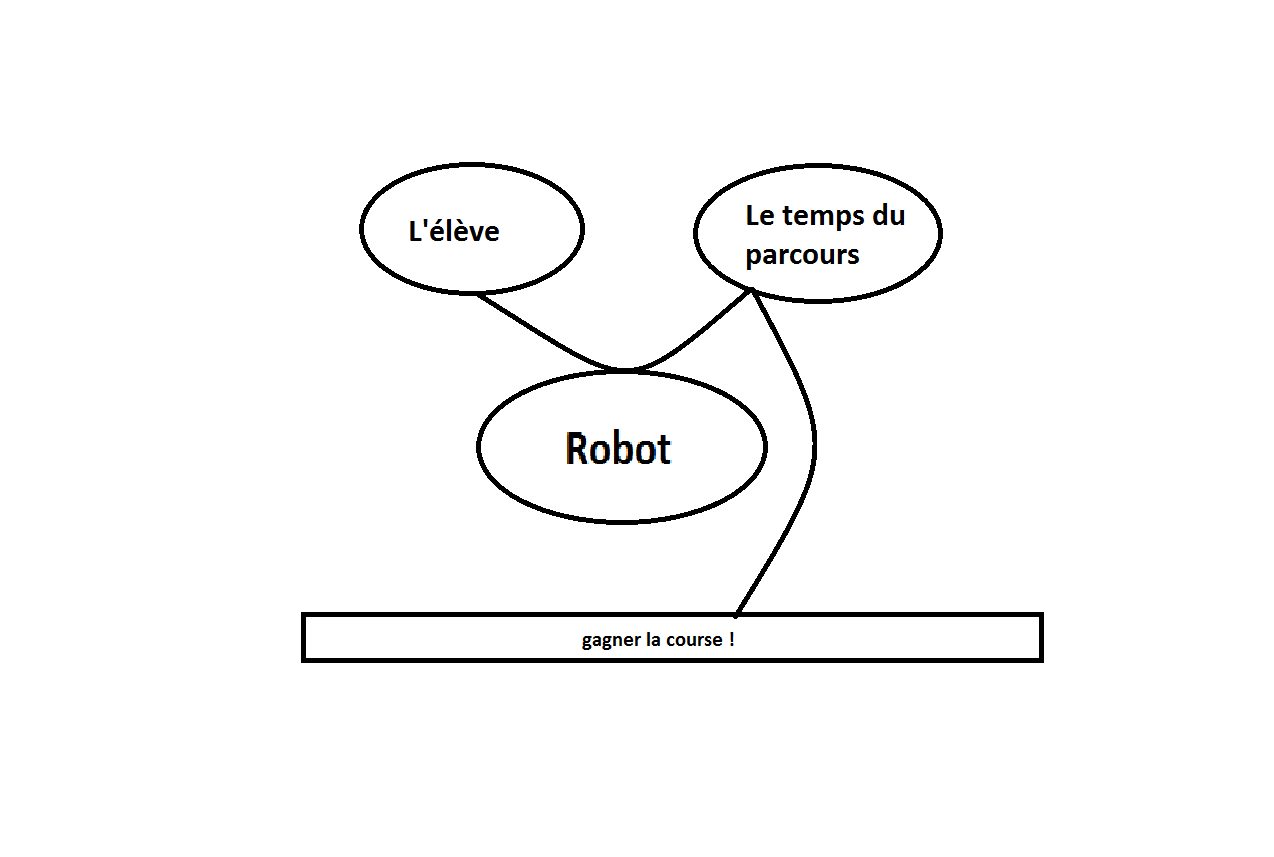
Un robot de course c'est un robot qui est capable d'avancer seul grâce à :
L'informatique , la mécanique (avec un moteur) , l'électronique (câbles et capteurs). Il a des actionneurs puis il commandé par un calculateur qui est destiné à effectuer une grande variété de tâche . Ils existent différentes variétés de robot comme Robot Mobile , Robot Volant ... Mais celui qui nous intéresse c'est le robot de course qui lui va effectuer un trajet avec les commandes que on lui auras fournis avec un temps de trajet précis et une vitesse maximale de translation ou de rotation de chaque axe . Par Radia ;)
-
-
Bonjour,
Chloé, Radia, Élie, vous présentent le projet robot que nous allons fabriquer tout au long de l'année . Le robot participera a une course qui auras un temps limitée de 3 min et mesurera 395 cm . Si jamais le robot n'arrive pas à la fin du parcours demandée dans le temps imparti ou s'il par faux mouvement aterri dans un mur , nous aurons l'occasion d'avoir une deuxième chance , elle auras lieu en Juin 2018 . Nous avons un budget de 15 euros , le module de pilotage ne sera pas pris en compte , sauf le moteur coutera 7 euros . Nous vous montrerons au fur et a mesure de l’année l’avancement de notre projet . En espérant que cela vous plaises . Par Chloé :)
-
- Le blog permet de rendre compte à l'ensemble des élèves du collège et de nos professeurs de l'état d'avancement de notre projet de participation au challenge robot .
 Suivre le flux RSS des articles Suivre le flux RSS des commentaires
Suivre le flux RSS des articles Suivre le flux RSS des commentaires







|
|
|
|